Ce que je décris ici, peut-être retrouvé en partie dans le manuel utilisateur de CMUCam2.
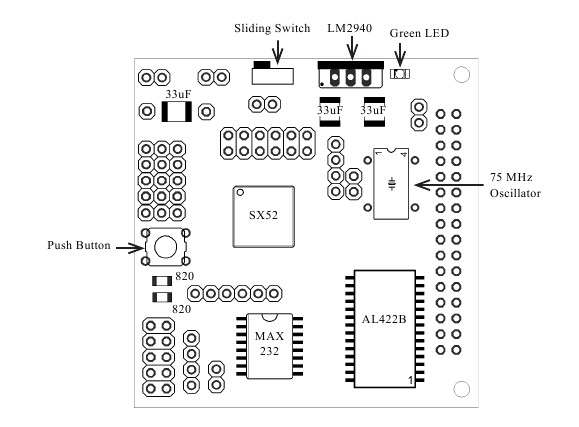
Coté composants dessus
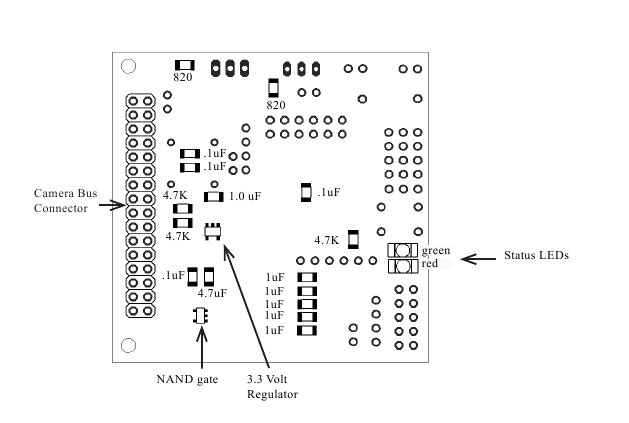
Coté composants dessous
Les connecteurs
CMUCam2 – Liste des broches du connecteur RS232
| Broche | Nom |
| 1 | NC |
| 2 | NC |
| 3 | Tx |
| 4 | Rx |
| 5 | NC |
| 6 | NC |
| 7 | NC |
| 8 | NC |
| 9 | Gnd |
| 10 | NC |
CMUCam2 – Liste des broches du connecteur TTL Port
| Broche | Nom | Affectation | Broche |
| 1 | Gnd | Gnd - Carte CPU | CN8-2 |
| 2 | Tx | Rx Uart7 - Carte CPU | CN8-14 |
| 3 | 5V | | |
| 4 | Rx | Tx Uart7 - Carte CPU | CN8-13 |
Les 5 connecteurs pour les servos sont câblés de la même façon.
SERVO_0, SERVO_1, SERVO_2, SERVO_3, SERVO_4 -Liste des broches des connecteurs SERVO_x
| Broche | Nom |
| 1 | Commande |
| 2 | +5V |
| 3 | Gnd |
et ils sont affectés ainsi:
Affectation des servos SERVO_0, SERVO_1, SERVO_2, SERVO_3, SERVO_4
| Nom du servo | Action |
| SERVO_0 | Action horizontale de la tête |
| SERVO_1 | Action verticale de la tête |
| SERVO_2 | NC |
| SERVO_3 | NC |
| SERVO_4 | NC |
Configuration
- JP1 :
- JP2 :
- JP3 :
- JP4 :
- JP5 :
Nomenclature
| {{Nom}} | {{Numéro}} | {{Qantité}} | {{Nom sur le schéma}} |
| High Brightness Red Led | 160-1405-1-ND | 1 | U$2 |
| High Brightness Green Led | 160-1404-1-ND | 2 | U$3,U$1 |
| 820 Ohm Resistor | 311-820ACT-ND | 4 | R2-4, R7 |
| 4.7 K resistor | 311-4.7KATR-ND | 3 | R1,R5-6 |
| NAND Gate | 296-1087-1-ND | 1 | SINGLE_NANDG$2 |
| Max 232 chip | 296-13095-1-ND | 1 | IC3 |
| MAX232CWE-ND | alternate | |
| 75 Mhz Oscillator | SG-8002DC-SHC-ND | 1 | QG1 |
| 5v Regulator | LM2940CT-5.0-ND | 1 | IC2 |
| 3.3v Regulator | LP2985IM5-3.3CT-ND | 1 | IC4 |
| Averlogic AL422B | | 1 | AL422B |
| Ubicom SX52 | | 1 | IC1 |
| Slide Switch | EG1847-ND | 1 | S2 |
| Push Switch | SW400-ND | 1 | S1 |
| 0.1uF Cap | 311-1141-1-ND | 4 | C7-9,C13 |
| 33uF Cap | 399-1634-1-ND | 2 | C1,C3 |
| 33uF Cap or 10uF 25V Cap | 399-1634-1-ND 399-1599-1-ND | 1 | C10 |
| 1.0uF Cap | PCC2249CT-ND | 5 | C4-6,C11,C12 |
| 2.2uF Cap | PCC1923CT-ND | 1 | C2 |
| Heatsink | HS333-ND | optional | |
| Double Female Header | 929852-01-36-ND | 1 | CAMERA_BUS |
| Single Male Header | 929647-09-36-ND | 3 | CLK, SX-KEY, RS232,PWR_PLUG, TTL_PORT, RS232_BYPASS, JP1-2, JP4-5 |
| Polarized 2 pin Terminal Housing | WM2700-ND | 2 | |
| Crimp Terminals | WM2200-ND | 4 | |
| Polarized 2 pin terminal header | WM2000-ND | 2 | PWR_PLUG, JP3 |
| Female serial ribbon cable head | AFS09G-ND | 1 | |
| Serial Ribbon Cable Socket Connector | ASC10G-ND | 1 | |