
Au départ, je devais faire cette carte moi-même pour la commande des 2 moteurs. j’ai besoin de commander 2 moteurs et d’une interface série pour les commandes venant de la carte CPU. En cherchant un schéma applicatif sur le L298, je suis tombé sur cette carte Serial Controlled Motor Driver de chez SparkFun.
La carte de contrôle moteur permet de commander 2 moteurs à courant continu en utilisant une interface de commande de série. L’interface série est facile à utiliser et il permet à l’utilisateur de sélectionner individuellement un moteur, la direction et la vitesse (jusqu’à 10 vitesses différentes, du stop à pleine vitesse). La carte est basée sur le double pont en H L298 de ST Micro. Il peut fournir 4A pour les 2 moteurs, soit 2A par moteur.
La carte peut-être alimenté entre 6V et 12V, la partie logique fonctionne en 5V mais les 2 moteurs sont alimentés par la tension d’entrée.
Une sur-intensité (>2A par moteur) est signalée par 2 LEDs (Stat1 pour le moteur 1 et Stat 2 pour le moteur 2)
L’interface de commande série utilisée pour le contrôle des moteurs est très simple. La commande est composée de 4 caractères: le numéro du moteur ({{1}} ou {{2}}), l’indicateur de direction ({{f}} ou {{r}}) , la vitesse ({{0-9}})et un retour chariot ({{/r}}). La vitesse de transmission de la liaison série est fixée à 115200 bauds (8-N-1).
Le schéma de la carte est disponible, ainsi que le guide utilisateur sont disponibles sur le site du constructeur.
Les connecteurs
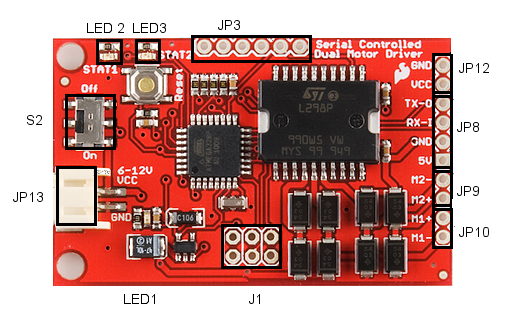
- JP12 et JP13 : Alimentation entre 6v et 12V.
| Broche | Fonction | Connecté à | Broche | Fonction |
|---|---|---|---|---|
| 1 | Gnd | Carte Alimentation | Gnd | |
| 2 | Vcc | Carte Alimentation | 12V |
ROB-09571 - Liste des broches du connecteur JP12
| Broche | Fonction | Connecté à | Broche | Fonction |
|---|---|---|---|---|
| 1 | Gnd | Carte Alimentation | Gnd | |
| 2 | Vcc | Carte Alimentation | 12V |
ROB-09571 - Liste des broches du connecteur JP13
- JP8 : Interface série de contrôle (niveau TTL)
| {{Broche}} | {{Fonction}} | {{Connecté à}} | {{Broche}} | {{Fonction}} |
|---|---|---|---|---|
| 1 | 5V | |||
| 2 | Rx-I | Carte CPU | DN9-13 | Tx Uart 6 (TTL) |
| 3 | Tx-O | Carte CPU | DN9-15 | Rx Uart 6 (TTL) |
| 4 | Gnd |
ROB-09571 - Liste des broches du connecteur JP8
JP9 et JP10 : Respectivement pour les moteurs M1 et M2
JP3 : Broches supplémentaires non utilisées
| {{Broche}} | {{Fonction}} | {{Affectation}} | {{Broche}} |
|---|---|---|---|
| 1 | PC4 | ||
| 2 | PC5 | ||
| 3 | ADC6 | ||
| 4 | ADC7 | ||
| 5 | 5V | ||
| 6 | Gnd |
ROB-09571 - Liste des broches du connecteur JP3
- J1 : Interface de programmation de l’AVR ATMEGA128
| {{Broche}} | {{Fonction}} |
|---|---|
| 1 | MISO |
| 2 | 5V |
| 3 | SCK |
| 4 | MOSI |
| 5 | RESET |
| 6 | Gnd |
ROB-09571 - Liste des broches du connecteur J1
- S2 : Interrupteur de mise sous tension
- LED 1 : Sous tension
- LED 2 : Indication de sur-Intensité du moteur M1 (Le moteur droit de MyBot)
- LED 3 : Indication de sur-Intensité du moteur M2 (Le moteur gauche de MyBot)