Les connecteurs
Alimentation
La carte TS-7800 a besoin d’une alimentation continue 5VDC à 1A quand la fréquence du CPU est à 500 MHz. Le connecteur à vis ({{CN3}}) a 2 bornes + et -.
Ethernet
Une interface Ethernet (10/100/1000) est disponible sur un connecteur RJ45 (T1). Ce connecteur possède aussi 2 LEDs (LINK/ACTIVITY et 10/100/1000 SPEED) intégrées.
La LED verte LINK (côté droit du connecteur) est active quand un lien Ethernet valide est détecté. Elle est allumée lorsque le TS-7800 est alimenté et correctement connecté à un réseau Ethernet 10/100/1000. La même LED ACTIVITY indique aussi l’activité pour indiquer l’émission ou la réception de données. La LED SPEED (côté gauche du connecteur) est allumée quand le lien est à 1000M et éteinte sur un lien 10/100. Ces deux LEDs sont contrôlées directement par le switch Marvell 88E1118 et ne charge pas le processeur.
USB
Le connecteur USB ({{J6}}) sur la carte TS-7800 offrent deux interfaces USB haute vitesse. Elles sont directement reliées au processeur {{MV88F5182}}, qui intègre un double port USB Open Host Controller Interface (OHCI), offrant des ports de communication série d’une vitesse de transmission de 480 Mbits/s. Jusqu’à 127 périphériques USB (imprimante, souris, appareil photo, clavier, etc) et de concentrateurs USB peuvent être connectés à l’hôte USB. Cela inclut les caractéristiques suivantes:
- USB 2.0 compatible OHCI Rev 1.0 Low Speed (1,5 Mbps), Full Speed (12 Mbps) Hi Speed (480 Mbps)
- Hub intégré avec 2 ports USB avec Transceiver intégrés
- Protection contre les surintensit et prise en charge de la gestion d’énergie en tant que maître du bus.
SATA
Il y a deux connecteurs SATA 2.0 (CN6 et CN12) PHY intégrés et connectés directement au processeur MV88F5182. Ces connecteurs sont compatibles SATA 2.0 Phase 1 et ce sont 2 connecteurs verticaux standards SATA. La carte TS-7800 n’a pas de connecteurs d’alimentation SATA.
SD Card
La carte est équipée de 2 connecteurs SD. Le premier SD (CN4) de type ALPS est à l’arrière de la carte et le second Micro-SD (CN7) sur le dessus de la carte. La partie principale d’accès aux SD est implémenté par le FPGA embarqué. Systems Technologic a écrit un driver Linux (tssdcard.ko). Par contre, pour l’instant seuls des sources pour un kernel 2.6.21 sont disponibles. Les deux prises sont SD bootable et sont compatibles avec des cartes SDHC.
PC 104
Le connecteur PC 104, composé de CN5 et CN11, permet d’avoir soit un port ISA, soit des Entrées/Sorties numériques. Pour l’instant, je ne vais utiliser que les Entrées/Sorties. Sur les 2 connecteurs, elles sont affectées de la manière suivante.
PC104 – Liste des broches des connecteurs A et B
| Broche | Nom | Fonction | Affectation | Broche | Broche | Nom | Fonction | Affectation | Broche |
| A1 | A[0] | | | | B1 | GND | GND | | |
| A2 | A[1] | | | | B2 | B[1] | | | |
| A3 | A[2] | | | | B3 | +5V | +5V | | |
| A4 | A[3] | | | | B4 | B[3] | | | |
| A5 | A[4] | | | | B5 | 3.3V | 3.3V | | |
| A6 | A[5] | | | | B6 | B[5] | | | |
| A7 | A[6] | | | | B7 | B[6] | | | |
| A8 | A[7] | | | | B8 | B[7] | | | |
| A9 | A[8] | | | | B9 | 8V_30V | | | |
| A10 | A[9] | | | | B10 | GND | GND | | |
| A11 | A[10] | | | | B11 | B[10] | | | |
| A12 | A[11] | | | | B12 | B[11] | | | |
| A13 | A[12] | | | | B13 | B[12] | | | |
| A14 | A[13] | | | | B14 | B[13] | | | |
| A15 | A[14] | | | | B15 | B[14] | | | |
| A16 | A[15] | | | | B16 | B[15] | | | |
| A17 | A[16] | | | | B17 | B[16] | | | |
| A18 | A[17] | | | | B18 | B[17] | | | |
| A19 | A[18] | | | | B19 | B[18] | | | |
| A20 | A[19] | | | | B20 | B[19] | | | |
| A21 | A[20] | | | | B21 | B[20] | | | |
| A22 | A[21] | | | | B22 | B[21] | | | |
| A23 | A[22] | | | | B23 | B[22] | | | |
| A24 | A[23] | | | | B24 | B[23] | | | |
| A25 | A[24] | | | | B25 | B[24] | | | |
| A26 | A[25] | | | | B26 | B[25] | | | |
| A27 | A[26] | | | | B27 | B[26] | | | |
| A28 | A[27] | | | | B28 | B[27] | | | |
| A29 | A[28] | | | | B29 | +5V | +5V | | |
| A30 | A[29] | | | | B30 | B[29] | | | |
| A31 | A[30] | | | | B31 | GND | GND | | |
| A32 | GND | GND | | | B32 | B[31] | | | |
PC104 – Liste des broches des connecteurs C et D
| Broche | Nom | Fonction | Affectation | Broche | Broche | Nom | Fonction | Affectation | Broche |
| C0 | GND | GND | | | D0 | GND | | | |
| C1 | C[1] | | | | D1 | D[1] | | | |
| C2 | C[2] | | | | D2 | D[2] | | | |
| C3 | C[3] | | | | D3 | D[3] | | | |
| C4 | C[4] | | | | D4 | D[4] | | | |
| C5 | C[5] | | | | D5 | D[5] | | | |
| C6 | C[6] | | | | D6 | D[6] | | | |
| C7 | C[7] | | | | D7 | D[7] | | | |
| C8 | C[8] | | | | D8 | 3.3V | 3.3V | | |
| C9 | C[9] | | | | D9 | D[9] | | | |
| C10 | C[10] | | | | D10 | D[10] | | | |
| C11 | C[11] | | | | D11 | D[11] | | | |
| C12 | C[12] | | | | D12 | D[12] | | | |
| C13 | C[13] | | | | D13 | D[13] | | | |
| C14 | C[14] | Tx Uart 9 (TTL) | | | D14 | D[14] | | | |
| C15 | C[15] | Rx Uart 9 (TTL) | | | D15 | D[15] | | | |
| C16 | C[16] | | | | D16 | +5V | +5V | | |
| C17 | C[17] | Tx Uart 8 (TTL) | Tx - Carte CMUCam2 | TTL - 2 | D17 | D[17] | | | |
| C18 | C[18] | Rx Uart 8 (TTL) | Rx - Carte CMUCam2 | TTL - 4 | D18 | GND | GND | | |
| C19 | GND | GND | | D19 | GND | GND | | | |
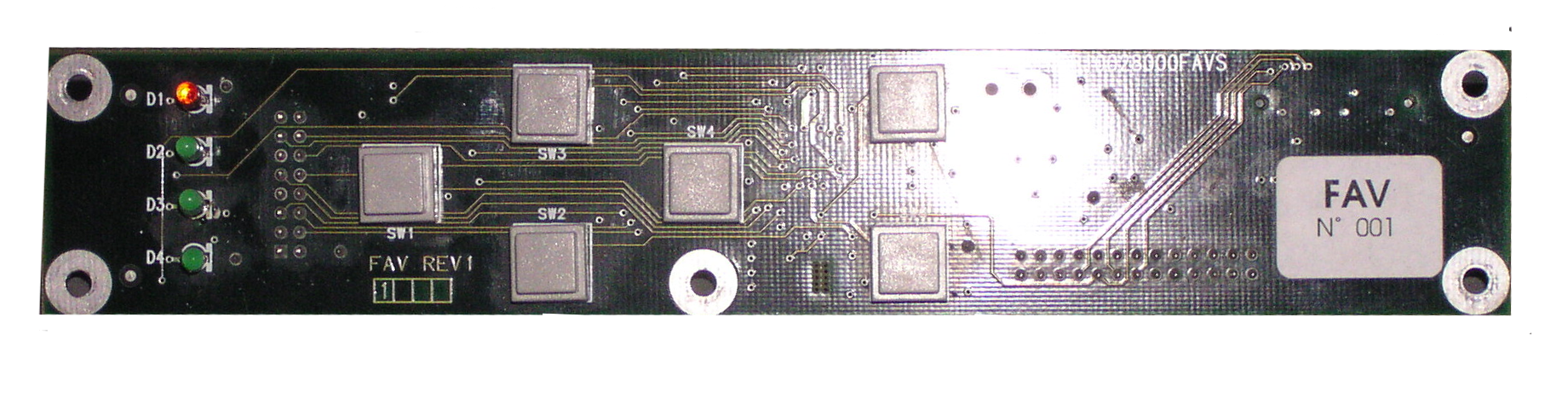
DIO
Ce connecteur (DN9) fournit plusieurs entrées/sorties numériques. Ces broches peuvent mises à l’état bas, sinon elles sont entrées avec résistances pull-up. Le pull-ups sont par 2.2k Ohms sur les broches impaires 1-15. Pin 10 a une 4.7K pull-up. Le reste est tiré vers le haut par le CPLD par la résistance nominale 20k-150k.
DIO – Liste des broches du connecteur DB9
| Broche | Nom | Fonction | Affectation | Broche |
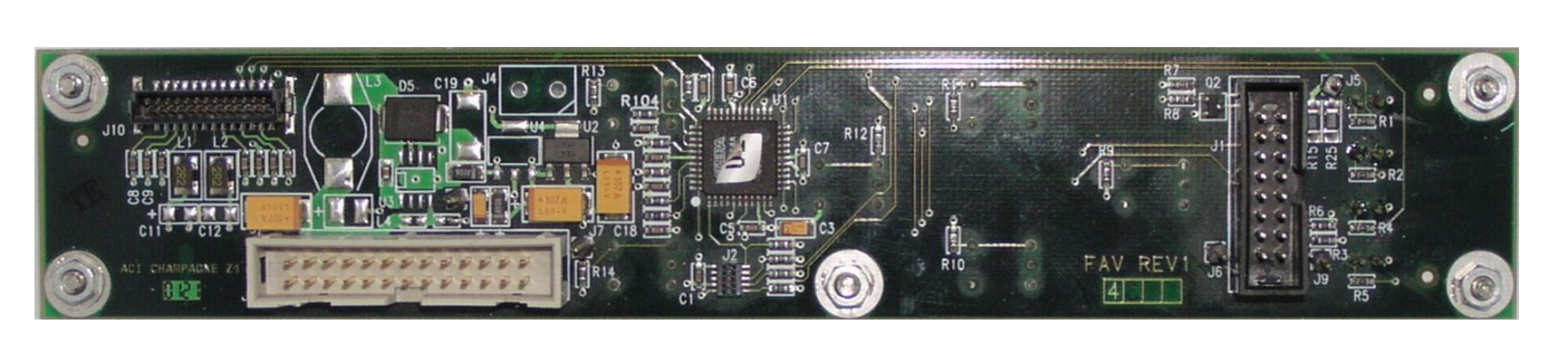
| 1 | DIO_1 | Command/Data Read/Write | Carte Afficheur graphique | K1-4 |
| 2 | Gnd | Gnd | | |
| 3 | DIO_3 | | | |
| 4 | DIO_4 | | | |
| 5 | DIO_5 | | | |
| 6 | SPI_FRAME | | | |
| 7 | DIO_7 | | | |
| 8 | DIO_8 | | | |
| 9 | DIO_9 | | | |
| 10 | SPI_MISO | SPI_MISO | IHM Face Avant | J3 - 15 |
| 11 | DIO_11 | CS_CPLD | IHM Face Avant | J3 - 17 |
| 12 | SPI_MOSI | SPI_MOSI | IHM Face Avant | J3 - 19 |
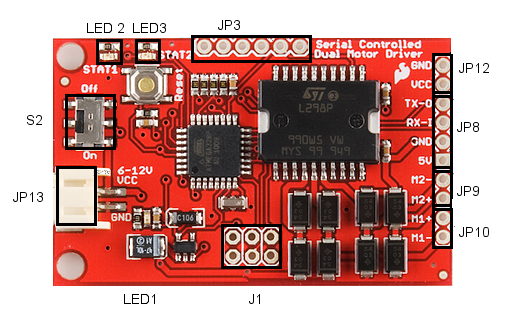
| 13 | DIO_13 | Tx Uart 6 (TTL) | Contrôle moteurs | JP8 - 2 |
| 14 | SPI_CLK | SPI_CLK | IHM Face Avant | J3 - 13 |
| 15 | DIO_15 | Rx Uart 6 (TTL) | Contrôle moteurs | JP8 - 3 |
| 16 | 3.3V | 3.3V | | |
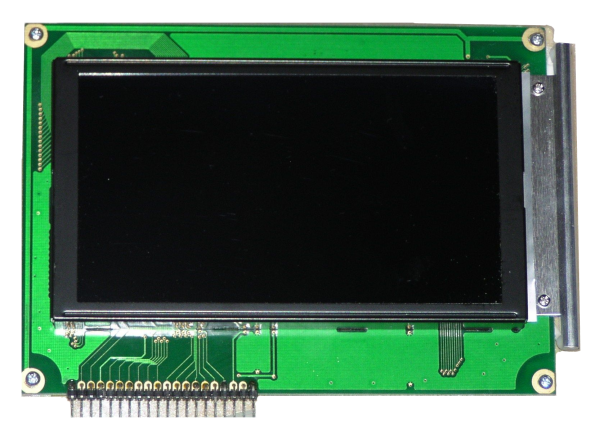
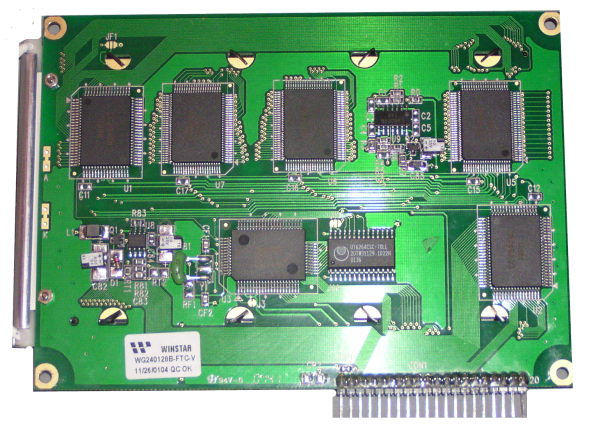
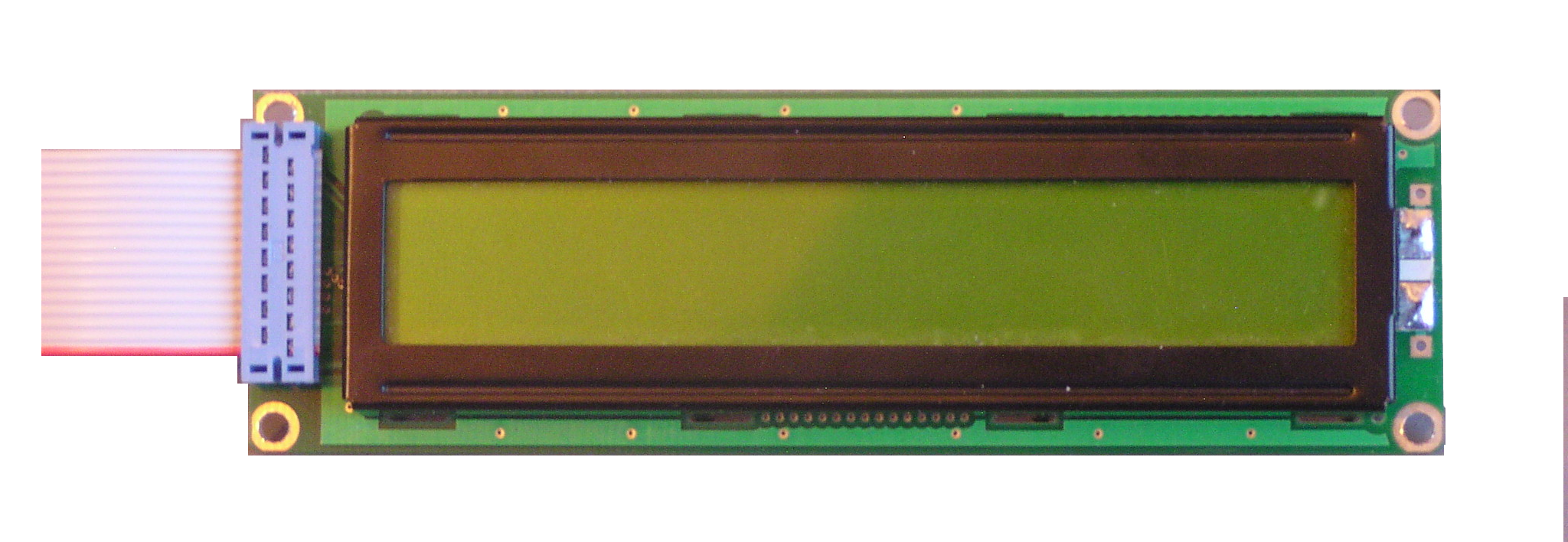
LCD
Ce connecteur ({{CN8}}) permet de brancher un écran LCD. Comme sur le connecteur DIO, les broches 7-14 peuvent être mises à l’état bas, sinon ils sont en tri-état avec une résistance de 2.2k en pull-up. Les broches 4 et 5 sont connectées en série avec, respectivement, des résistances de 470 Ohm et 51 Ohm.
Sur MyBot, j’utilise un écran LCD WINSTAR WG240128B.
LCD – Liste des broches du connecteur CN8
| Broche | Nom | Fonction | Affectation | Broche |
| 1 | 5V | 5V | | |
| 2 | Gnd | Gnd | | |
| 3 | BIAS | | | |
| 4 | RS | Data read | Carte Afficheur graphique | K1-5 |
| 5 | RW | Data write | Carte Afficheur graphique | K1-6 |
| 6 | EN | Chip Enable | Carte Afficheur graphique | K1-15 |
| 7 | DB0 | Data bus line 0 | Carte Afficheur graphique | K1-7 |
| 8 | DB1 | Data bus line 1 | Carte Afficheur graphique | K1-8 |
| 9 | DB2 | Data bus line 2 | Carte Afficheur graphique | K1-9 |
| 10 | DB3 | Data bus line 3 | Carte Afficheur graphique | K1-10 |
| 11 | DB4 | Data bus line 4 | Carte Afficheur graphique | K1-11 |
| 12 | DB5 | Data bus line 5 | Carte Afficheur graphique | K1-12 |
| 13 | DB6 | Data bus line 6 | Carte Afficheur graphique | K1-13 |
| 14 | DB7 | Data bus line 7 | Carte Afficheur graphique | K1-14 |
DB9
Le connecteur DB9 ({{J1}})permet d’accéder au port COM1 (/dev/ttyS0, par défaut, la console Linux). Tous les signaux sont au niveaux RS-232.
DB9 – Liste des broches du connecteur DB9
| Broche | Fonction | Affectation | Broche |
| 1 | DCD | | |
| 2 | RD | | |
| 3 | TD | | |
| 4 | DTR | | |
| 5 | Gnd | | |
| 6 | DSR | | |
| 7 | RTS | | |
| 8 | CTS | | |
| 9 | RI | | |
COM2
Le connecteur COM2 (CN1)permet d’accéder au port COM2 (/dev/ttyS1). Tous les signaux sont au niveaux RS-232. Avec l’option RS-422 et les composants MAX485 U18 et U17 (non soudés sur ma carte) on peut avoir des signaux au niveau RS-422.
COM2 – Liste des broches du connecteur CN1
| Broche | Fonction | Affectation | Broche |
| 1 | NC | | |
| 2 | RxD | | |
| 3 | TxD | | |
| 4 | NC | | |
| 5 | Gnd | | |
| 6 | NC | | |
| 7 | NC | | |
| 8 | NC | | |
| 9 | NC | | |
| 10 | NC | | |
COM3
Le connecteur COM3 ({{CN10}})permet d’accéder au port COM3 (/dev/ttyS2). Tous les signaux sont au niveaux RS-232.
COM3 – Liste des broches du connecteur CN10
| Broche | Fonction | Affectation | Broche |
| 1 | NC | | |
| 2 | RxD | | |
| 3 | TxD | | |
| 4 | NC | | |
| 5 | Gnd | | |
| 6 | NC | | |
| 7 | RTS | | |
| 8 | CTS | | |
| 9 | NC | | |
| 10 | NC | | |
A/D
Au moyen d’un microcontroler AVR, on dispose de 6 canaux de conversion Analogique/Numérique 10bits. Les entrées doivent être comprises entre 0 et 3.3V et sont échantillonnées à 2 kHz. Cinq de ces six canaux sont connectés au connecteur {{HD7}}.
A/D – Liste des broches du connecteur HD7
| Broche | Fonction | Affectation | Broche |
| 1 | Canal 0 | | |
| 2 | Gnd | | |
| 3 | Canal 1 | | |
| 4 | Gnd | | |
| 5 | Canal 3 | | |
| 6 | Gnd | | |
| 7 | Canal 2 | | |
| 8 | Gnd | | |
| 9 | Canal 7 | | |
| 10 | Gnd | | |
Le canal restant (canal 6) est relié à Vcc de l’option régulateur de tension (8-30V). Un diviseur de tension est utilisé pour diviser Vcc / 9 afin de s’assurer que la tension ne dépassera pas 3,3V.
Jtag
Ce connecteur JTAG (J2) est utilisé en usine pour la programmation du FPGA et du CPLD. Il n’est pas disponible pour le débogage JTAG sur le CPU. L’utilisation du JTAG (broches 1-10) n’est pas recommandée.
Les broches 11-16 de ce connecteur sont utilisées pour les signaux COM du connecteur DB9 (COM1).
Jtag – Liste des broches du connecteur J2
| Broche | Fonction | Affectation | Broche |
| 1 | Jtag DINCanal 0 | | |
| 2 | NC | | |
| 3 | Jtag_TMS_CPU | | |
| 4 | 3.3V | | |
| 5 | Jtag_Clk | | |
| 6 | CPU_Reset # | | |
| 7 | Jtag_CPU_DOUT | | |
| 8 | Gnd | | |
| 9 | Jtag_TMS | | |
| 10 | Jtag_DOUT | | |
| 11 | COM1 CTS | | |
| 12 | COM1 RTS | | |
| 13 | COM1 RxD | | |
| 14 | COM1 TxD | | |
| 15 | COM1_DCD | | |
| 16 | COM1_DTR | | |